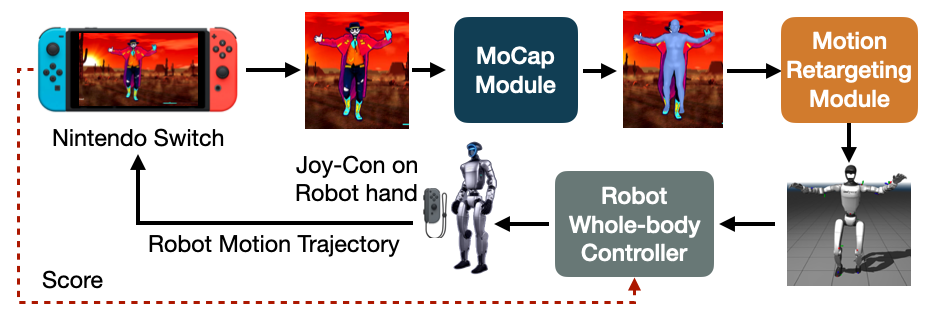
Recent advances in whole-body robot control have enabled humanoid and legged robots to execute increasingly agile and coordinated movements. However, standardized benchmarks for evaluating robotic athletic performance in real-world settings and in direct comparison to humans remain scarce. We present Switch4EAI(Switch-for-Embodied-AI), a low-cost and easily deployable pipeline that leverages motion-sensing console games to evaluate whole-body robot control policies. Using Just Dance on the Nintendo Switch as a representative example, our system captures, reconstructs, and retargets in-game choreography for robotic execution. We validate the system on a Unitree G1 humanoid with an open-source whole-body controller, establishing a quantitative baseline for the robot's performance against a human player. In the paper, we discuss these results, which demonstrate the feasibility of using commercial games platform as physically grounded benchmarks and motivate future work to for benchmarking embodied AI.