Tianyu Li 黎天宇
I am a Founding Research Scientist at Dexmate. I earned my Ph.D. in Computer Science from Georgia Tech. My research focuses on Agentic Robotics and Robot Whole-body Control.
There are a few folks that own the same name, such as Tianyu Li@MIT and Tianyu Li@UPENN, please make sure you contact the correct Tianyu Li.
Experience
Employment

Founding Research Scientist
Dexmate
2025 — Present

Researcher
FAIR @ Meta
2024

Research Scientist
FAIR @ Facebook
2019 — 2021
Education
Ph.D. in Computer Science
Georgia Tech
Advisor: Prof. Sehoon Ha
Thesis: Cross-Embodiment Whole-Body Skill Imitation
2022 — 2025
M.S. in Computational Science
Carnegie Mellon University
Advisors: Prof. Hartmut Geyer, Prof. Chris Atkeson
2017 — 2018

B.E. in Energy and Power Engineering
Beihang University
2013 — 2017
Research
Switch-JustDance: Benchmarking Whole-Body Motion Tracking Policies Using a Commercial Console Game
Jeonghwan Kim*, Wontaek Kim*, Yidan Lu*, Jin Cheng*, Fatemeh Zargarbashi*, Zicheng Zeng*, Zekun Qi*, Zhiyang Dou, Nitish Sontakke, Donghoon Baek, Sehoon Ha, Tianyu Li
MoReFlow: Motion Retargeting Learning through Unsupervised Flow Matching
Wontaek Kim, Tianyu Li*, Sehoon Ha*
Switch4EAI: Leveraging Console Game Platform for Benchmarking Robotic Athletics
Tianyu Li, Jeonghwan Kim, Wontaek Kim, Donghoon Baek, Seungeun Rho, Sehoon Ha
Learning Physical Interaction Skills from Human Demonstrations
Tianyu Li, Hengbo Ma, Sehoon Ha, Kwonjoon Lee
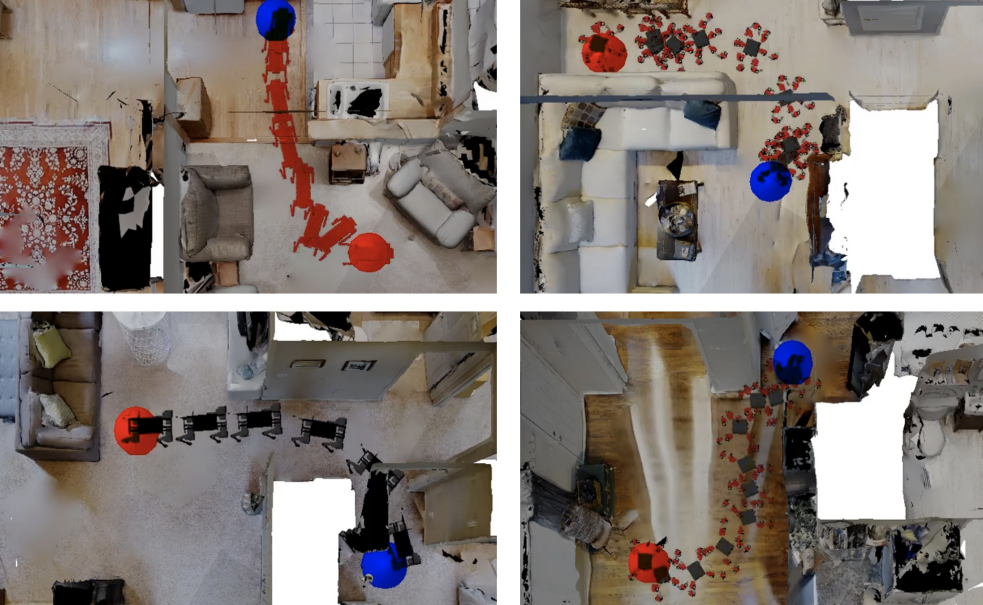
RobotMover: Learning to Move Large Objects by Imitating the Dynamic Chain
Tianyu Li, Joanne Truong, Jimmy Yang, Alexander Clegg, Akshara Rai, Sehoon Ha, Xavier Puig
Language Guided Skill Discovery
Seungeun Rho, Laura Smith, Tianyu Li, Sergey Levine, Xue Bin Peng, Sehoon Ha
AAMDM: Accelerated Auto-regressive Motion Diffusion Model
Tianyu Li, Zhuhan Qiao, Guanqiao Ren, KangKang Yin, Sehoon Ha
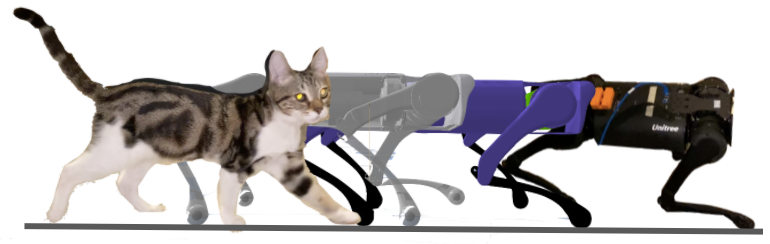
CrossLoco: Human Motion Driven Control of Legged Robots via Guided Unsupervised Reinforcement Learning
Tianyu Li, Hyunyoung Jung, Matthew Gombolay, Yong Kwon Cho, Sehoon Ha
ACE: Adversarial Correspondence Embedding for Cross Morphology Motion Retargeting from Human to Nonhuman Characters
Tianyu Li, Jungdam Won, Alexander Clegg, Jeonghwan Kim, Akshara Rai, Sehoon Ha

Learning and Adapting Agile Locomotion Skills by Transferring Experience
Laura Smith, J Chase Kew, Tianyu Li, Linda Luu, Xue Bin Peng, Sehoon Ha, Jie Tan, Sergey Levine
ARMP: Autoregressive Motion Planning for Quadruped Locomotion and Navigation in Complex Indoor Environment
Jeonghwan Kim, Tianyu Li, Sehoon Ha
FastMimic: Model-based Motion Imitation for Agile, Diverse and Generalizable Quadrupedal Locomotion
Tianyu Li, Jungdam Won, Sehoon Ha, Akshara Rai

Planning in Learned Latent Action Spaces for Generalizable Legged Locomotion
Tianyu Li, Roberto Calandra, Deepak Pathak, Yuandong Tian, Franziska Meier, Akshara Rai

Learning Generalizable Locomotion Skills with Hierarchical Reinforcement Learning
Tianyu Li, Nathan Lambert, Roberto Calandra, Franziska Meier, Akshara Rai
Learning Navigation Skills for Legged Robots with Learned Robot Embeddings
Joanne Truong, Denis Yarats, Tianyu Li, Franziska Meier, Sonia Chernova, Dhruv Batra, Akshara Rai
Bayesian Optimization in Variational Latent Spaces with Dynamic Compression
Rika Antonova, Akshara Rai, Tianyu Li, Danica Kragic
Using Deep Reinforcement Learning to Learn High-Level Policies on the ATRIAS Biped
Tianyu Li, Hartmut Geyer, Christopher G Atkeson, Akshara Rai