|
|
I am a Founding Research Scientist at Dexmate. Previously, I was a Research Scientist at Facebook/Meta(FAIR Robotics). I earned my PhD in Computer Science from Georgia Tech(2022-2025), where I worked on Cross Embodiment Imitation Learning with Sehoon Ha. My research lies at the intersection of robotics, computer animation, and machine learning, with a focus on whole-body control and imitation learning for robots and physically simulated characters. There are a few folks that own the same name, such as Tianyu Li@MIT and Tianyu Li@UPENN, please make sure you contact to correct Tianyu Li. |
|
|
|
|
Jeonghwan Kim*, Wontaek Kim*, Yidan Lu*, Jin Cheng*, Fatemeh Zargarbashi*, Zicheng Zeng*, Zekun Qi*, Zhiyang Dou, Nitish Sontakke, Donghoon Baek, Sehoon Ha, Tianyu Li Arxiv, 2025 Project Page / Arxiv |
|
|
Wontaek Kim, Tianyu Li*, Sehoon Ha* arXiv, 2025 Project Page / Arxiv |
|
|
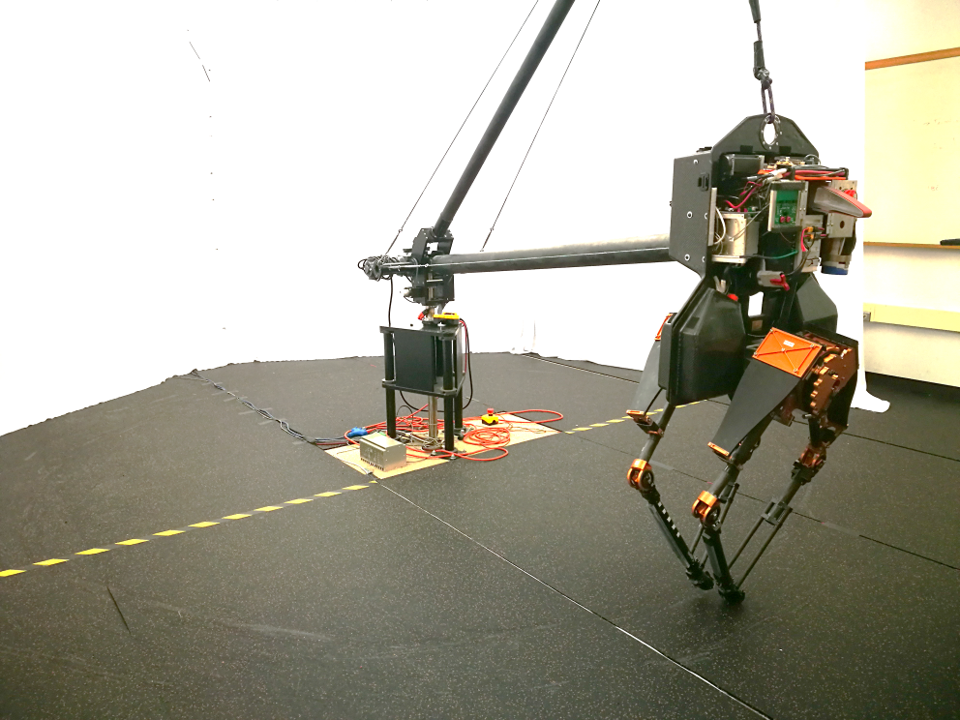
Tianyu Li, Jeonghwan Kim, Wontaek Kim, Donghoon Baek, Seungeun Rho, Sehoon Ha CoRL Open-Source Hardware in the Era of Robot Learning Workshop, 2025 Project Page / Arxiv |
|
|
Tianyu Li, Hengbo Ma, Sehoon Ha, Kwonjoon Lee Arxiv, 2025 Arxiv |
|
|
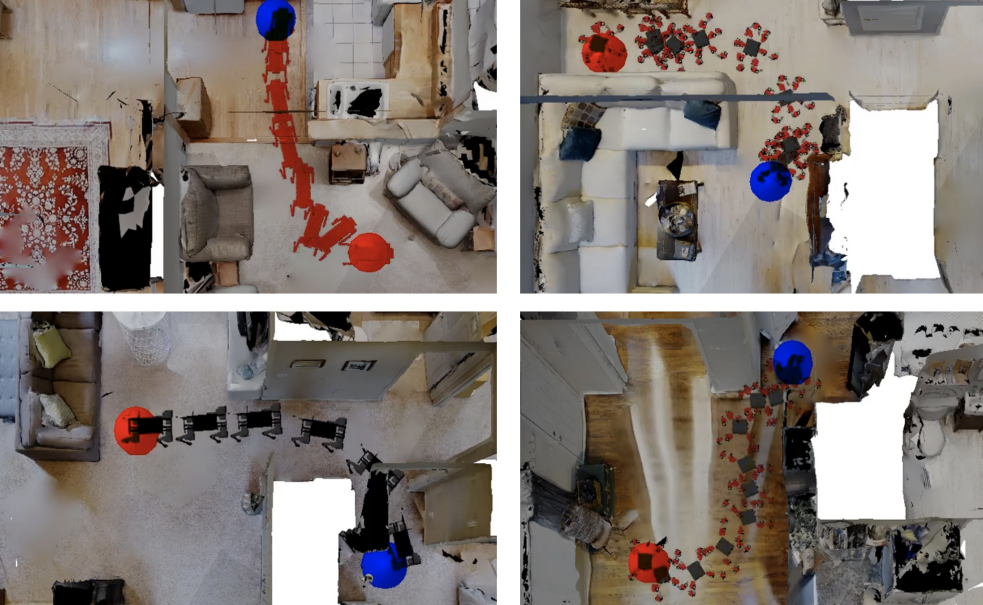
Tianyu Li, Joanne Truong, Jimmy Yang, Alexander Clegg, Akshara Rai, Sehoon Ha, Xavier Puig Arxiv, 2025 Project Page / Arxiv |
|
|
Seungeun Rho, Laura Smith, Tianyu Li, Sergey Levine, Xue Bin Peng, Sehoon Ha ICLR, 2025 Paper |
|
|
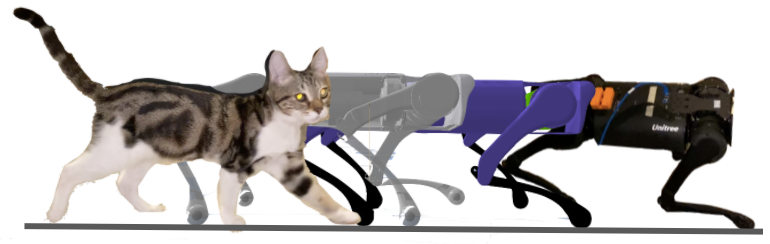
Tianyu Li, Zhuhan Qiao, Guanqiao Ren, KangKang Yin, Sehoon Ha CVPR, 2024 Project Page / Paper / Video |
|
|
Tianyu Li, Hyunyoung Jung, Matthew Gombolay, Yong Kwon Cho, Sehoon Ha ICLR, 2024 Project Page / Paper / Video / Code |
|
|
Tianyu Li, Jungdam Won, Alexander Clegg, Jeonghwan Kim, Akshara Rai, Sehoon Ha SIGGRAPH ASIA, 2023 Project Page / Paper / Video / Gatech Interview |
|

|
Laura Smith, J Chase Kew, Tianyu Li, Linda Luu, Xue Bin Peng, Sehoon Ha, Jie Tan, Sergey Levine RSS, 2023 Project Page / Arxiv |
|
Jeonghwan Kim, Tianyu Li, Sehoon Ha IROS, 2023 Project Page / Arxiv / Video |
|
|
Tianyu Li, Jungdam Won, Sehoon Ha, Akshara Rai Robotics, 2023 Paper / Video |

|
Tianyu Li, Roberto Calandra, Deepak Pathak, Yuandong Tian, Franziska Meier, Akshara Rai RA-L, 2021 Paper / Video |

|
Tianyu Li, Nathan Lambert, Roberto Calandra, Franziska Meier, Akshara Rai ICRA, 2020 Paper / Video |
|
Joanne Truong, Denis Yarats, Tianyu Li, Franziska Meier, Sonia Chernova, Dhruv Batra, Akshara Rai IROS, 2020 Paper |
|
Rika Antonova, Akshara Rai, Tianyu Li, Danica Kragic CoRL, 2019 Paper |
|
Tianyu Li, Hartmut Geyer, Christopher G Atkeson, Akshara Rai ICRA, 2019 Paper |
|
Modified version of template from this. |